
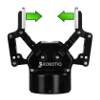
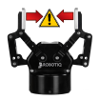
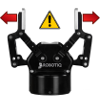
All Robotiq Grippers are designed as programmable robot grippers able to handle most parts in the industrial environment, eliminating the need for changeovers. The grippers can be used in a variety of areas: machine tending, assembly, advanced manufacturing, and research. The user has control over the force, speed, and position parameters, allowing for complete control of the gripper. The different models have stroke, force, payload, speed, and weight differences.
| 2-Finger 85 |
2-Finger 140 |
|
| Gripper Stroke | 0 to 85 mm 0 to 3.3 in |
0 to 140 mm 0 to 5.5 in |
| Grip Force | 20 to 235 N 4.5 to 52.8 lbf |
10 to 125 N 2.2 to 28 lbf (pinch mode) |
| Maximum Recommended Payload | 5 kg 11 lbs |
2.5 kg 5.5 lbs |
| Closing Speed | 20 to 150 mm/s 0.8 to 5.9 in/s |
30 to 250 mm/s 1.2 to 9.8 in/s |
| Gripper Weight | 850 g 1.9 lbs |
1000 g 2.2 lbs |
| 3-Finger |
|
| Gripper Stroke | 0 to 155 mm 0 to 6.1 in |
| Grip Force | 15 to 60 N 3.4 to 13.5 lbf (pinch mode) |
| Maximum Recommended Payload | 10 kg 22 lbs |
| Closing Speed | 22 to 110 mm/s 0.87 to 4.33 in/s |
| Gripper Weight | 2.3 kg 5 lbs |
With the drivers installed directly on the robotic interface, basic programming of the Robotiq Gripper is made simple and easy. The user only needs to know a select few commands to make the gripper close, open, and move to a specific position: rq_close(), rq_open(), rq_move(). All of the commands begin with “rq_” which makes knowing which commands are for the Robotiq versus the robot as simple as glancing at the beginning of the command. Other commands allow the user to set/change the force and speed of the gripper within the program..


Robotiq provides a Universal Robot kit which allows for simple integration of the Gripper to the robotic arm. With the simple insertion of an USB drive into the UR teach pendant, the Robotiq drivers are automatically installed on the UR interface. This includes a series of gripper template programs to aid in setting up any application, as well as, an easy-to use Graphical User Interface (GUI). This GUI allows the user to jog the robot (open, close, move) and change the force and speed outside of the program.
The FT 150 Force Torque Sensor is designed to measure force and position control. This 6-axis sensor, like all Robotiq products, is easy to integrate (ROS stack or USB drive). The sensor provides immunity from external electrical noise, allowing for finer measurements. Unlike other force sensors, the FT 150 can be used directly as a digital input to the robot controller; no need for an external signal processing box.

| FT 150 |
FT 300 |
|
| Measuring Range | +/-150 N +/-15 Nm +/-33.7 lbf +/-11 in lbf |
+/-300 N +/-30 Nm +/-67.4 lbf +/-22 in lbf |
| Outside Diameter | 120 mm 4.72 in |
75 mm 3 in |
| Data Output Rate | 100 Hz |
100 Hz |



